









В статье описывается применение нашего датчика скорости и длины ИСД-5 в качестве датчика линейного перемещения.
Первичным измеряемым параметром является скорость объекта
- Линейное перемещение вычисляется как сумма ΔSi = ΔVi*Δti , при этом время между измерениями Δt =30 мс (при частоте измерений 33 Гц), т.е. значение скорости (и пути) обновляется каждые 30 мс.
- Частоту измерений значительно увеличить не удается, поскольку из общих принципов для точного измерения требуется некоторое время (его можно сократить, но соответственно ухудшится точность единичного измерения).
Промышленные применения: например необходимо контролировать линейное перемещение какого либо механического объекта относительно поверхности. Все вычисления линейного перемещения должны производиться относительно базовой точки контроллером без ОС, с жестким алгоритмом реального времени. При этом наиболее точным является перевод данных длины в непрерывную последовательность импульсов, частота которых жестко привязана к текущей измеренной скорости и эта частота обновляется каждые 30 мс.
Например, в контроллере выставлено, что скорости 1 м/с соответствует 1000 Гц импульсного выхода. За 1 с объект пройдет 1 м, соответственно, на каждый импульс приходится 1 мм перемещения. При 2 м/с выходная частота 2000 Гц и на каждый импульс опять приходится 1 мм. Т.е. для любой измеренной скорости выходная частота изменяется так, что всегда 1 имп = 1 мм. Это поясняется рис.1:

Рис.1. Изменение частоты импульсного сигнала (меандр) от измеренной скорости. Частота изменяется после очередного измерения скорости, но по достижении целого числа периодов предыдущего измерения, поэтому нет никаких скачков (дополнительных импульсов) при изменении частоты.
Здесь красная линия – реальная скорость, черные – измеренная скорость за предыдущие 30 мс.
Оценка погрешности измерений линейного перемещения из-за дискретности измерения скорости:
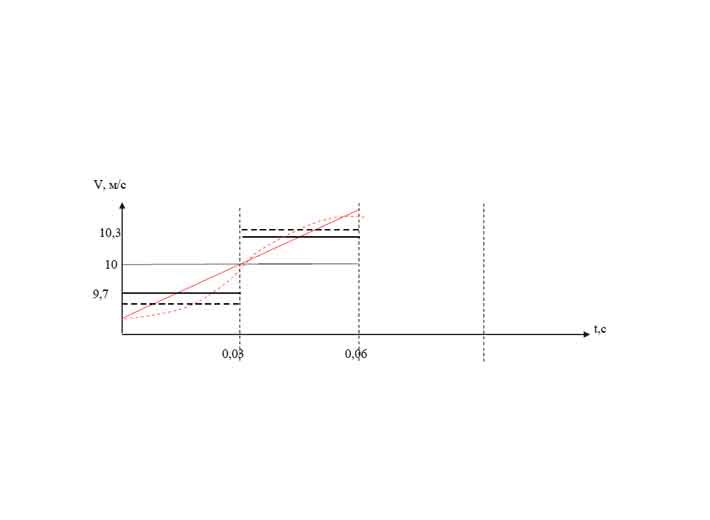
При переменной скорости ее нужно измерять чем чаще, тем лучше. Оценим, какая частота измерений достаточна (дальнейшее увеличение не приводит к увеличению точности отреза) исходя из критерия максимально физически возможного ускорения объекта. Пусть это будет 10 м/с2 (см. рис.2) Тогда за время 30 мс объект увеличит скорость на V=at = 0,3 м/с. Пусть при постоянной скорости 10 м/с мы измеряем перемещение за 2 измерения (за 0,06 с) при выставленном коэффициенте 1000 Гц/м/с. Получим 10000 имп/с *0,06с = 600 мм или по 300 мм на измерение. При ускорении объекта 10 м/с2 получим скорости, например, 9,7 и 10,3 м/с, соответственно частоты 9700 и 10300 Гц и число импульсов 291 + 309 = те же 600 мм. и переместится на S = at2/2 = 4,5 мм.

Рис.2. Перемещение объекта с постоянным ускорением 10 м/с2 и с переменным (пунктирные линии скорости).
То есть, при движении объекта с постоянным ускорением результат измерения линейного перемещения также не зависит от частоты измерения. Разумеется, при переменных ускорениях могут быть эффекты второго порядка нелинейности, например, при нарастании ускорения измеренное линейное перемещение немного занижается, а при нарастании замедления – завышается. Но, поскольку скорость перемещения колеблется относительно некоторой заданной для процесса, эти эффекты взаимно компенсируются, тем более на перемещениях в десятки метров. Практика показала, что частоты измерения 35 Гц (как сейчас) достаточно для практически всех применений (если не рассматривать импульсные процессы (ударные, с большими ускорениями и малыми временами)).
Таким образом, импульсный выход позволяет измерить линейное перемещение с практически любым разрешением (можно выставить и 0,1 мм/имп).
Как показывает практика работы с нашими датчиками ускорения движущихся объектов на которых они устанавливаются допустимо до 5 м/с2 в пределах паспортных данных по линейному перемещению.